Thermotropic LCEs Power Soft Robotics
Engineers leverage thermotropic LCE phase transitions to power prosthetics, overcoming rigid motor constraints with flexible actuation.
Legacy haptic technologies, such as Eccentric Rotating Mass motors, constrain wearable development. These systems force designers to accommodate rigid structures, poor portability, and low spatial resolution. Engineers solve these constraints using Liquid Crystal Elastomers. These polymers utilize a thermotropic order-disorder phase transition to generate work. When heat pushes the material above its isotropic clearing temperature, internal mesogens transition from a programmed monodomain state into a disordered isotropic state. This entropic loss of order forces the elastomer to contract macroscopically parallel to the molecular director. This delivers soft, lifelike actuation, eliminating limitations inherent to conventional motors.
You can also read: Liquid Crystal Elastomers in Soft Robotics
Comparative Actuation Metrics
To understand the industrial viability of Liquid Crystal Elastomers, engineers evaluate physical performance across varying formulations. The table below outlines core metrics observed during thermal actuation testing.
| Metric | LCE Tendons | LCE Composites |
| Max Strain | 43.6% | 100% |
| Max Stress | 546 kPa | 0.46 MPa |
| Input | 6 V at 4.5 A | 6.5 V |
| Power Density | 27 W | 9.97 kJ/m³ |
| Peak Temperature | 110–160 °C | 40–80 °C |
Comparative metrics between LCE Tendons and LCE Composites. Adapted from Biomimetic Prosthetic Hand Enabled by Liquid Crystal Elastomer Tendons and Toward Application of Liquid Crystalline Elastomer for Smart Robotics: State of the Art and Challenges
Specialized LCE formulations deliver robust contractile capabilities for robotics. Alternative composite films achieve superior strain, but specialized tendons generate exceptional stress necessary for prosthetic load bearing. Designers face severe thermal management bottlenecks when integrating these materials. High currents drive rapid heating, but natural thermal dissipation demands up to 102 seconds for a cooling cycle. Engineers mitigate this lag by implementing forced convective cooling using compressed air. This strategy slashes response time to 5 seconds. Thermal regulation proves essential for maintaining high-frequency actuation cycles in practical environments.
Visualizing Phase Transitions for Application Design
Understanding microscopic phase shifts remains vital for teams optimizing smart materials. Direct shifts in mesogen alignment cause the macroscopic linear contraction observed during operational heating. Engineers rely on macroscopic programming steps, specifically uniaxial stretching, to dictate the precise physical actuation path. By manipulating the polymer network formulation, developers successfully tailor the exact isotropic clearing temperature to meet application demands. While resistive heating dominates prosthetic designs, researchers also utilize photothermal heating via embedded gold nanorods or carbon nanotubes. Mastering these thermotropic phase transitions enables designers to push the functional boundaries of precise tactile feedback systems.
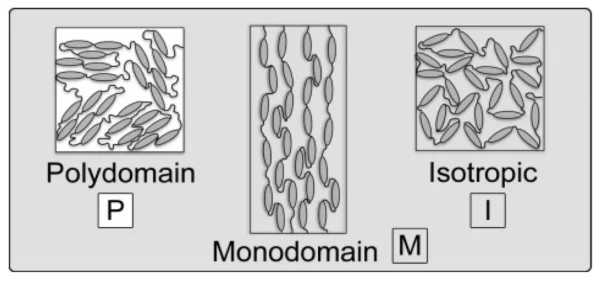
Schematic of distinct phases of LCE. Courtesy of Wearable Actuators: An Overview.
Fabrication and System Integration
Initially, manufacturers build these soft prosthetics by integrating the active elastomer into a layered structure on a flexible substrate. To begin, technicians screen-print a liquid metal heating element—composed of 25 percent gallium and 75 percent indium—onto a 25-micrometer high-bond tape support layer. Subsequently, they cast the precursor solution directly over the heater.
To lock in the monodomain alignment, operators stretch the cured polymer uniaxially by 200 percent prior to applying ultraviolet light fixation. As a result, this integrated Joule heating architecture allows the soft robotic hand to actuate individual fingers independently. Furthermore, the biomimetic device executes complex gestures, grips delicate objects safely, and lifts external weights reaching 252 grams. Beyond prosthetics, additional industrial applications include reprogrammable Braille displays, artificial irises, and smart thermal-regulation clothing.
Conceptual representation of fabrication and system integration.
Engineers stand at the threshold of a new era in soft robotics. Liquid Crystal Elastomers directly replace bulky haptic motors with silent, flexible actuation systems. While developers must overcome thermal dissipation bottlenecks using convective cooling, the raw mechanical power and lifelike form factor of these polymers unlock unprecedented industrial capabilities. From biomimetic prosthetic hands that safely grasp delicate equipment to reprogrammable tactile displays, mastering these complex thermotropic transitions provides application designers the toolkit for engineering next-generation smart materials.