Cobots in Plastic Bag Manufacturing
As manufacturers embrace Industry 4.0, collaborative robots leveraging machine learning (ML) bring autonomy and efficiency to the factory floor.
Data indicates that implementing Industry 4.0 technology can make supply chains more efficient and sustainable. Additionally, innovative technology can increase productivity, prevent occupational accidents, and reduce factory waste. Researchers in Edinburgh are investigating how innovative Industry 4.0 technology can support plastic bag manufacturing.
Collaborative Robotics: Overcoming the Challenges of Transparent Bags
Collaborative robots, or “cobots,” work alongside humans without extensive restrictive measures, such as safety barriers and cages. A recent study hopes to overcome some of the obstacles of manipulating and autonomously cutting transparent plastic bags with cobots.
You can also read: Robotics and Automation to Reap Benefits from AI
Because these bags are transparent, their light reflection and refraction make computer vision challenging. Furthermore, plastic bags are deformable, making them difficult to manipulate. This study integrates advanced object detection tools, such as YOLOv5, with convolutional neural network (CNN) algorithms into cobots for this purpose.
Mechanisms of Plastic Bag Manufacturing
Researchers created a prototype industrial automation system that comprises three main systems.
- Feeding: The feeding system consists of a Franka Emika Panda cobot arm, a camera, and a custom suction cup gripper. The camera identifies the top of plastic stacks and establishes a picking order. Then, the robot arm places the stacks into custom enclosures.
- Cutting: The cutting system consists of both a gripping and cutting mechanism. Suction secures the packaging of the stacks while the cutting mechanism traverses a rail and slices the packaging.
- Delivery: The delivery system uses linear actuators as a pushing mechanism against the enclosure’s back wall. Following the cobot arm’s removal of the packaging, a door on the enclosure will open. Then, the actuators push the unpackaged stacks onto an acrylic skid plate.
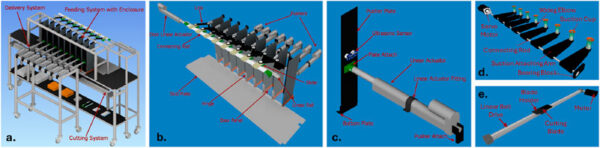
This novel system automates the unpacking and cutting of transparent plastic bags. Figure courtesy of Vision-based manipulation of transparent plastic bags in industrial setups.
This system uses QR codes as points of reference and to provide depth readings. This also allows grouping of the bags into different zones. The cobot uses this information to return to the next sequential stack after loading it into the feeding system.

Computer vision, powered by YOLOv5, allows the system to categorize stacks of plastic bags using QR codes. Figure courtesy of Vision-based manipulation of transparent plastic bags in industrial setups.
Robot Operating System (ROS), with libraries such as motion-planner and move-it, controls the cobot. As the master controller, a Raspberry-Pi commands an Arduino module to handle actuation and feedback based on the controller’s commands.
Testing the Robot
The system showed promising results during testing. Average success rates for picking and placing were 86.25% and 82.5%, respectively. On average, each iteration of this task took 8.3 minutes. During cutting, the system showed no errors across 10 iterations, with an average completion time of 15.7 seconds. In the fourth phase of the process, the robot unfolded each of eight bags. This took an average of 38.9 seconds. The delivery was also successful for all eight bags, taking an average of 18.4 seconds.
Industrial Applications
This novel technology shows promise for use in industry. Further paths for development include altering the cutting mechanism to accommodate other types of packaging. Exploring the system’s scalability will provide more insight into its performance in real-world scenarios.